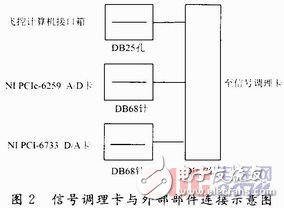
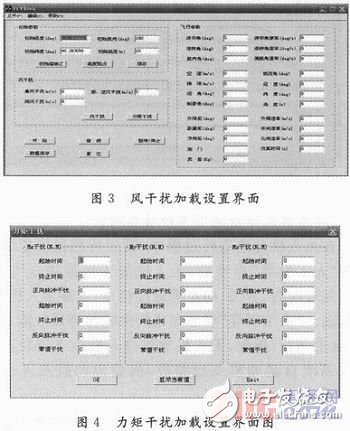
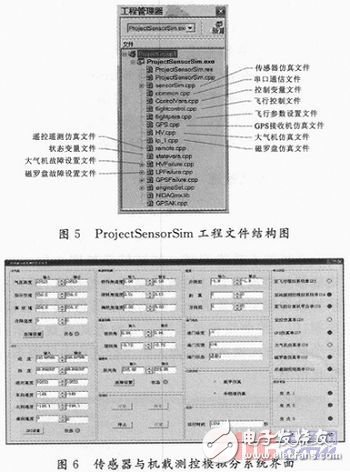
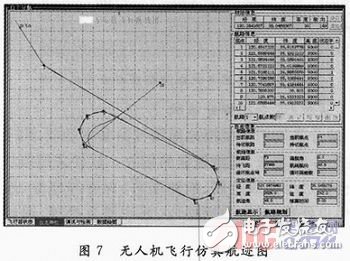
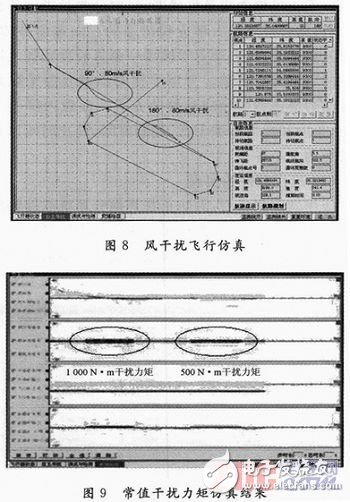
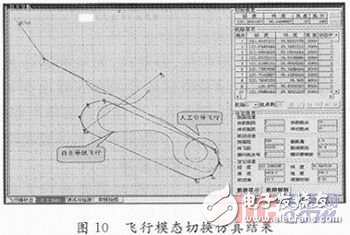
UAVs as targets for analog aircraft strikes can provide air targets for missions such as flight control radar shooting and shooting in air defense weapon systems, and are indispensable for weapons system development and identification. As one of the core components of the drone, the flight control system controls the attitude of the drone to complete the mission of the drone under various modalities. The existing test methods for a drone flight control system include discrete component testing and integrated machine testing after component installation. Both methods belong to conventional static tests, which have complex organization, low test efficiency, long task preparation period, and can not verify the dynamic performance of the actual flying process of the drone. It is difficult to locate faults during testing, and it is in flight. Environmental disturbances (mainly wind disturbances) and drone flight after sensor failure cannot be simulated, making it impossible to carry out targeted flight control strategy corrections. In summary, the task of developing a set of UAV flight control system semi-physical simulation platform is particularly urgent. The platform uses an existing drone flight control system as the test object, and mainly completes the following functions: (1) Combine with drone flight control computer, electric steering gear, throttle motor and other physical objects to complete the flight control system simulation test; (2) Flight performance simulation under conditions of wind disturbance and torque disturbance, and real-time display of drone flight path, rudder angle, rudder angle rate and other changes in a two-dimensional curve; (3) It is possible to perform fault set-up of some sensors of the flight control system of a drone, and perform flight modal simulation under fault conditions. The semi-physical simulation platform consists of hardware devices and application software. Hardware equipment includes newly-built flight system simulation subsystems, sensors and airborne monitoring and control simulation subsystems, remote/telescope simulation subsystems, command display subsystems, drone appearance display subsystems, and existing flight control computers and flight controllers. Computer interface box, electric steering gear, throttle motor and other physical objects. Application software includes new applications for each subsystem. The schematic block diagram of the semi-physical simulation platform is shown in Figure 1. The working principle of the semi-physical simulation platform is as follows: The sensor and airborne monitoring and control simulation sub-system exchanges information such as the rudder angle, angular velocity, throttle opening, remote command, and external interference of the drone through the interface box and the flight control computer. The flight system simulation sub-system transmits the sampled and converted flight control computer execution result, and transmits the remote measurement information to the remote/telemetry simulation sub-system (including the simulation data of the sensor and airborne monitoring and control simulation equipment, fault status, remote control instruction, etc.). After the flight control computer will receive the information to solve the problem, it will control the electric steering gear and accelerator motor to perform corresponding actions and return the execution result to the sensor and airborne monitoring and control simulation subsystem. The flight system simulation sub-system sends the calculated aircraft state parameters to the drone appearance display sub-system, and then displays the drone posture, throttle opening, altitude change, and other information in the form of three-dimensional animation. The command shows that the sub-system will display the received information on the position, altitude, and speed of the drone on a digital map, issue a command password at the right time, and interfere with the flight of the drone by the operator. The three-dimensional shape, measurement and control data, and command display interface of the drone are displayed on the projection screen in time by the KVM switch. (1) Application software platform selection principle Since the platform is a fixed test equipment, the hardware of application platform running in each subsystem should be rack-mounted industrial computers or desktop computers. The number and type of motherboard slots should be relatively sufficient to facilitate the existing hardware boards. The follow-up function of the installation and platform development. (2) Selection principle of data acquisition card: one is to ensure the number of channels; the other is to ensure the sampling frequency; the third is to guarantee the data resolution. (1) Sensor and Airborne Measurement and Control Simulation Subsystem The subsystem includes a large number of signal acquisition, exchange and processing tasks. The hardware adopts an IPC architecture. Configure data acquisition cards, multi-serial cards, and self-developed signal conditioning cards to complete data acquisition and information exchange. The specific hardware model and basic parameters are: The industrial control computer uses Siemens 547B: 64-bit CPU processor, 4 PCI slots, 1 PCI-Ex16 graphics expansion interface. Multi-serial cards use MOXA CP 118U: 4-way RS 232/422/485 PCI serial port, serial communication rate is 921.6 Kb/s; on-board 15 kVESD surge protection. The D/A card uses NI PCI-6733: 8 channels of D/A, data update rate of 1 MS/s (16b), and 8 channels of Nine I/O. The A/D card uses NI PCIe-6259: 4 channels of D/A, data update rate of 1 Ms/s (16 b), 32 channels of A/D channels, and A/D sampling rate of 2.8 MS/s ( 16 b), 48 digital I/O. The DIO card uses NI PCIe-6503: 24 digital I/Os. (2) Flight System Simulation Subsystem, Remote Control/Telemetry Simulation Subsystem These two sub-systems are mainly used for the transmission and solution of UAVs and measurement and control data. The hardware components are relatively simple. You can use ordinary commercial desktop computers with multiple types of motherboard slots to configure MOXA CP118U multi-serial cards. (3) Command Display Subsystem, UAV Profile Display Subsystem These two sub-systems are mainly used for commanding and displaying the application software, and ordinary commercial desktop computers with multiple types of motherboard slots can be selected. When the sensors and airborne monitoring and control simulation sub-systems and remote/telemetry simulation sub-systems, flight system simulation sub-systems, flight control computer interface boxes and other parts of the data exchange, through the D/A, A/D, DIO board to complete the signal conversion It will be affected by the complex electromagnetic environment inside the chassis, resulting in a strong noise output signal, which needs to be filtered. In addition, since the input and output voltages of the flight control computer interface box are all +27 V, and the working voltages of the D/A, A/D, and DIO cards are all +5 V, signal conditioning cards need to be designed to complete the signal filtering and operating voltage. Conversion. Figure 2 shows the connection between the signal conditioning card and external components. The platform application software includes five application softwares, such as flight system simulation sub-system, drone appearance display sub-system, sensor and airborne monitoring and control simulation sub-system, remote/telemetry simulation sub-system, and command display sub-system. It mainly solves the UAV dynamic model and obtains information such as attitude and engine of the UAV to realize UAV flight simulation. The simulation process considers binding of wind disturbances and torque disturbances simultaneously. (1) Selection of application software development environment Due to the need to solve the UAV dynamics model, taking into account the VC++6.0 has a large number of functional computing libraries, its data computing capabilities are more prominent, so use VC++6.0 as an application software development environment. (2) UAV dynamic model establishment The establishment of a drone dynamics model is the basis of the flight system simulation. According to the reference, a drone dynamics model is established. (3) Loading of wind disturbances and torque disturbances The wind disturbance simulation is mainly to project the wind speed and wind direction onto each body axis, and then combine the three-way velocity equations in the aerodynamic equation group to calculate the three-way velocity, and after being solved into the dynamic model, the wind is added to interfere with the wind. The attitude parameters of the aircraft. The torque disturbance loading method takes the direct setting of the corresponding parameters in the dynamic model. Set content packet disturbance torque, forward and backward pulse interference, start time, end time, and constant torque. (4) Implementation of application software After the application software is completed, in order to prevent mis-modification during the software programming process of other subsystems, the UAV model is provided with dynamic link library (UAVSimu.DLL), and the setting of external torque is completed through the interference setting interface, as shown in the figure. 3, shown in Figure 4. It can simulate the characteristics of sensors such as GPS receivers, magnetic headings, and air data computers, and output them to related subsystems in the form of digital or analog signals for simulation on the actual platform. The types of faults that can be set include: GPS receiver failure, heading transition, big data computer height jump. (1) Selection of application software development environment Because the application software needs a lot of software interface development during the design process, Borland's C++Builder integrated development environment's biggest advantage lies in its direct drag-in method in the software interface development process, which greatly facilitates project development. Therefore choose C++Builder for application software development. (2) Overall software design Create a "ProjectSensorSim" project file, including the project file shown in Figure 5, run the project file, generate subsystem software interface, as shown in Figure 6. This sub-system is used to simulate the basic functions of the ground monitoring and control station and is used to complete the transmission of remote control commands and the reception of telemetry data. The software adopts a modular design, including two-dimensional curve drawing, route binding, saving and deleting, track drawing, serial port processing, telemetry data receiving, telemetry information processing, remote command processing and other modules. The shape display subsystem uses VC++2010 software and is developed based on OpenGL. The software module includes: a communication interface module, a three-dimensional presentation module, an instrument display module, and the like. (1) Reducing communication delay time between systems Due to the distributed and modular structure, the communication between the sub-systems through the serial port will inevitably lead to the problem of communication delay. In the software design process, the following measures are taken to solve: 1 Reduce the simulation step size of flight system simulation software and increase the continuity of flight parameters; 2Improve serial port baud rate of attitude information transmission between three subsystems of flight system simulation, sensor and airborne monitoring and control simulation and flight control computer simulation; 3 Optimize the frame structure of serial data communication between sensors and airborne monitoring and control simulation sub-systems and other sub-systems; ensure that attitude information arrives at the flight control computer in the shortest possible time. (2) Real-time processing technology of industrial control equipment data Because the sensor and airborne measurement and control simulation subsystem adopts the IPC architecture, it needs to perform data communication with multiple subsystems such as the flight system simulation. All tasks are required to be completed in milliseconds. In software design, MulTImedia TImer (Multimedia Timer) is combined with multithreading in the Windows environment. The application of the multimedia timer is an accurate timer supported by the computer from the hardware, and its timing error can generally reach ten microseconds, which can fully meet the real-time requirements. Connect each component of the platform as shown in Figure 1, run the application software, and perform basic system-wide functional testing. The test results are shown in Figure 7. The drone can complete the flight simulation according to the pre-bind route; the remote/telemetry simulation software can display the attitude information of the drone, the sensor simulation information, etc. in real time, and can be intuitively displayed by the two-dimensional curve and the status indicator; three-dimensional animation. The method vividly shows the attitude and height of the UAV during flight. (1) Simulation in wind disturbance mode In the flight system simulation sub-system, through the "wind interference" function button, set the wind disturbance to be positive north 90°, 80 m/s and positive north 180°, 80 m/s, observe the drone flight simulation track changes , as shown in Figure 8. It can be seen that after the drone has been disturbed by the wind, the track has undergone a significant change in a short time, and then the flight control system can correct the deviation of the route in time so that the drone can fly in accordance with a predetermined route. (2) Simulation under disturbance torque In the flight system simulation sub-system, set the constant disturbance torques with external disturbances of 1000 N·m and 500 N·m, respectively, to observe the simulation of UAV under this interference situation, as shown in Fig.9. It can be seen from the figure that the rudder declination angle and the rudder declination rate of the UAV under different moments. Under the disturbance force/torque applied, the attitude of the drone changes significantly. The flight control system then adjusts the rudder angle and the rudder angle rate to eliminate the influence of external disturbances and ensure that the drone can follow the predetermined attitude. Normal flight. In the autonomous flight of the drone, the sensor is set to simulate the failure and the "manual guidance" command is sent, and the drone enters the remote command flight mode. Send remote commands such as right, direct, and left to observe the flight path of the drone. After the “manual guidance†mode is completed, the sensor failure is released, and then the “autonomous flight†command is sent, the drone reenters the autonomous flight state, and the flight control system automatically adjusts the flight parameters to fly to the set waypoint, as shown in Figure 10. Show. This paper introduces the basic functions, overall technical solutions, hardware selection schemes and software design schemes of the UAV flight control system semi-physical simulation platform. Finally, the basic functions of the platform were tested and verified. The platform can be used not only for simulation testing of flight control systems, but also for drone flight law research, flight performance assessment, and simulation training for operators. According to the classification of the shape, Telephone Cable have round telephone cable and Flat Telephone Cable.
If the general family is the local telephone use mode, 2 chip is enough to use.If the telephone is used by a company or part of a group, it is recommended to use a 4-cell line in consideration of the need for telephone broadband, and a 6-cell line is recommended if a digital telephone is used.
Round Telephone Cable,Communication Cable,Telephone Line,Power Wire Shenzhen Kingwire Electronics Co., Ltd. , https://www.kingwires.com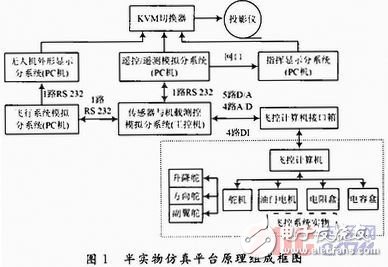
The common specification of round telephone cable has two core and four core, the wire diameter has 0.4 and 0.5 respectively, some areas have 0.8 and 1.0.In addition to the two and four cores, there are four, six, eight, and ten cores.
0 Preface