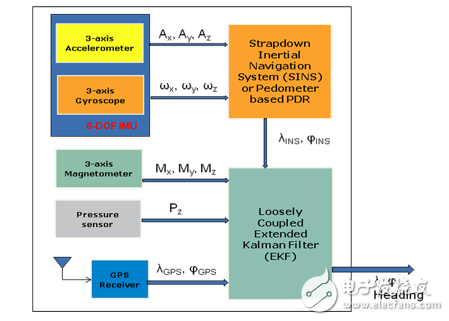
MEMS sensors include accelerometers (ACC), gyroscopes (GYRO), magnetometers (MAG), pressure sensors (PS), and microphones (MIC). Because of low cost, small size, low power consumption, and high performance, MEMS sensors have been integrated into portable devices in recent years. Fast CPU, multitasking operating system, high sensitivity GPS receiver, 3G / 4G wireless communication chipset, high resolution digital camera, touch screen LCD display and mass storage are common features of smartphones. The use of MEMS sensors is no longer limited to current applications such as screen rotation, power saving, motion detection, digital compass and 3D gaming. Currently, navigation manufacturers are developing more advanced MEMS sensor applications, such as Augmented Reality (AR), Location Services (LBS), and Pedestrian Dead Reckoning System (PDR). This article will discuss the role of MEMS sensors in advanced mobile applications, such as Mobile Augmented Reality (MAR), Positioning Service (LBS), and MEMS sensor and GPS receiver integration solutions that use a dead reckoning algorithm to determine orientation. Augmented Reality (AR) is not a new topic. By definition, augmented reality is a function or user interface that overlays graphics, sound, and other perceptual enhancement techniques on a real-time display of real-world environments and makes them interactive and maneuverable. Converging 3D virtual information in a real environment helps to improve the user's realism around the virtual target environment. Several successful application cases have recently emerged in augmented reality technology. For example, car safety equipment projects information about road conditions and conditions around the car onto the front windshield, giving the driver a complete picture of where the car is. Another application example is to point the smartphone at a target with a known location, such as a restaurant or supermarket, and the phone will display information about the target. In addition, if you are in a strange big city, this feature can also help you find the nearest subway station, just rotate the phone 360 ​​degrees, you can lock the subway route and reach the destination in the direction indicated. Social networks play an important role in the lives of modern people. When a person approaches a shopping center, he can use his mobile phone to point to the shopping center. His friends will then receive virtual information about his location and surrounding environment enhanced by digital processing techniques. Vice versa, he will also receive the location and surrounding information of his friend. Therefore, augmenting reality is a new way to change people's perception of the real world. Due to the rapid growth of the smartphone market, mobile devices are beginning to emerge to enhance their real-world applications. Figure 1 shows the key components needed to implement mobile augmented reality within a smartphone. Figure 1: Mobile Augmented Reality System Architecture for Smartphones • Digital camera: used to transmit the information flow of the real world environment and display the captured video on the LCD touch screen. A 5 megapixel or higher resolution imaging sensor is currently available on the new smartphone. • CPU, mobile operating system, user interface and software development tools: These are the core components of a smartphone. The new smartphone is now equipped with a dual-core CPU above 1GHz, 512MB of RAM and 32GB of memory. In the application development process, the user interface and software development tools (SDKs) allow developers to easily invoke application interfaces to access graphics, wireless communication functions, databases, and MEMS sensor raw data without knowing the detailed principles behind the code. • High Sensitivity GPS Receiver or A-GPS or DGPS: These modules are used to determine the user's current latitude and longitude position when valid satellite signals are captured. Over the years, people have been studying to improve the receiving sensitivity and positioning accuracy of GPS receivers in indoor and high-rise areas, because satellite signals are weakened and multi-channel interference errors occur in such areas. • Wireless data transmission interface, including GSM/GPRS, WiFi, Bluetooth and RFID: The main purpose of the wireless data interface is to access the Internet, retrieve the online database of current location targets, and provide brief location information while waiting for GPS positioning or no GPS signals. . If the transmitter is pre-installed in the building, other short-range wireless connections such as WLAN, Bluetooth and RFID can also provide accurate indoor positioning information. • Native or online database: Used to overlay enhanced virtual target information onto real-world video. When the target matches the current orientation, the system will be able to retrieve the target's information from the native database or online database. The user can then click on a hyperlink or icon on the touch screen to receive more detailed location information. • LCD touch screen with built-in digital map: Provides a high-resolution user interface that displays real-world video with virtual target information. With a digital map, users can know the name of the street where the current location is, without having to wear any special 3D glasses. • MEMS sensors (accelerometers, magnetometers, gyroscopes, and pressure sensors): These sensors are self-contained components that work anywhere, anytime. Because of their low cost, small size, light weight, low power consumption, and high performance, they are the semiconductor products of choice for pedestrian dead reckoning applications. These sensors are integrated with the GPS receiver to obtain position information indoors and outdoors. The following sections will explore the important role these sensors play in improving indoor navigation accuracy. Accurate and reliable location information anywhere, anytime, to align virtual targets with real-world environments is a major challenge for mobile augmented reality applications. Although the smartphone has a built-in GPS receiver, the outdoor positioning function is very good, showing the heading on the digital map, but some GPS receivers cannot receive satellite positioning signals in indoor or high-rise urban areas. Even outdoors, GPS does not provide accurate position or heading information when the car or pedestrian is stationary. GPS cannot distinguish small height changes. In addition, GPS can't provide gesture information to mobile phones or car users with just one antenna, such as pitch/roll/heading information. The Differential Global Positioning System (DGPS) is capable of achieving a positioning accuracy of a few centimeters; however, another GPS receiver is required to act as a base station to transmit reference position information to the mobile GPS receiver using a certain distance coarse acquisition code. Auxiliary Global Positioning System (A-GPS) helps GPS to obtain indoor positioning information to some extent, but cannot provide accurate positioning information at acceptable intervals. When the mobile phone user is stationary, at least three GPS antennas are required to allow the GPS to detect the user's gesture information. However, installing multiple GPS antennas on a smartphone is currently not feasible. Therefore, GPS-only smartphones do not provide accurate orientation and attitude information for mobile phone users. The self-guided MEMS sensor is an ideal choice to assist GPS in implementing an integrated navigation system and providing indoor and outdoor LBS positioning services. When the antenna is not occluded, the absolute positioning accuracy of modern GPS receivers is 3 meters to 20 meters. This parameter will not drift after a period of time. The MEMS sensor-based Strapdown Inertial Navigation System (SINS) provides accurate positioning information in a short period of time, but depending on the performance of the motion sensor, the navigation system will drift quickly after a period of use. phenomenon. The Pedestrian Dead Reckoning System (PDR) is a relative navigation system that calculates the walking distance from the known initial position in the room according to the step and azimuth. Although the positioning accuracy does not drift over time, it needs to be interfered by magnetic force. The heading accuracy is maintained within the environment. In addition, the GPS needs to calibrate the step size to achieve acceptable positioning accuracy. According to the Strapdown Inertial Navigation System (SINS) theory, inertial sensors (3-axis accelerometers and 3-axis gyroscopes) can be divided into three categories based on inherent deviation drift and scaling factors: navigation, tactical, and commercial. The horizontal position error of the independent accelerometer and gyroscope can be calculated by the following two equations [1]. Accelerometer position error: among them: ACC_bias ... Accelerometer long-term deviation stability, unit: mg; g = 9.81m/s2 T ... double integration period, in seconds Position error caused by PE_ACC ... ACC_bias; unit: meter. Gyro position error: (2) among them: g ... Earth's gravity, 9.81m/s2 GYRO_bias ... Gyro long-term deviation stability, unit: rad / s T ... double integration period, in seconds Position error caused by PE_ACC ... GYRO_bias; unit: meter. The above two equations can be used to calculate the performance of a typical inertial sensor and the horizontal position error caused by long-term deviation stability. When inertial sensors are integrated with GPS, these errors do not expand over time. Other factors that cause positional errors, such as missing, nonlinear, and temperature effects, should also be considered in the calculations. Recent advances in MEMS processes have enabled MEMS accelerometers and gyroscopes to continuously provide higher positioning performance, bringing commercial-grade products closer to the performance of tactical products. In a shorter time, such as 1 minute, independent accelerometers and gyroscopes can achieve relatively high measurement accuracy. This is useful for GPS/SINS integrated navigation systems when GPS signals are blocked. For consumer electronics, an indoor pedestrian dead reckoning system with a 5% travel distance error is generally acceptable. For example, when a person walks a distance of 100 meters, the positioning error should be within 5 meters. This requires a heading error of between ±2° and ±5° [2]. For example, if the dead reckoning error is 2°, when a person walks a distance of 100 meters, the positioning error should be within 3.5 meters [= 2*100m*sin(2°/2)]. In addition, MEMS pressure sensors are capable of measuring absolute air pressure relative to sea level. Therefore, the MEMS sensor can determine the height of the mobile phone user between 600 meters below sea level and 9000 meters above sea level, and assist in GPS height measurement [2]. Figure 3 shows the structure of a pedestrian dead reckoning system using a MEMS sensor and a GPS receiver. Figure 3: Structure diagram of mobile device pedestrian dead reckoning system Sensor integration is a set of digital filtering algorithms that correct the defects of each individual sensor and then output accurate, fast dynamic (pitch/roll/yaw) attitude measurements. The purpose of sensor integration is to take the measurement data of each sensor as input data, and then apply the digital filtering algorithm to mutually correct the input data, and finally output accurate and fast dynamic attitude measurement results. Therefore, the heading or azimuth is not affected by environmental magnetic interference, and there is no problem of zero drift of the gyroscope. The digital compass that corrects the tilt consists of a 3-axis accelerometer and a 3-axis magnetometer that provides heading information based on the Earth's North Pole. However, this heading information is easily interfered by environmental magnetic forces. If you install a 3-axis gyroscope and develop a 9-axis sensor integration solution, you can maintain accurate heading information anytime, anywhere. When designing a system that uses multiple MEMS sensors, it is important to understand the advantages and disadvantages of each of the MEMS sensors listed in the table below. • Accelerometer: It can be used for tilt correction digital compass in static or slow motion; it can be used in the pedometer detection function to detect whether the current state of the walker is stationary or moving. However, when the system is stationary in 3D space, the accelerometer cannot distinguish between true linear acceleration and Earth's gravity, and is susceptible to vibration and oscillation. • Gyro: It can continuously provide a rotation matrix from the system carrier coordinates to the local earth horizontal coordinates. When the magnetometer is disturbed, the gyroscope can assist the digital compass to calculate the heading data. Long-term zero-bias drift leads to unrestricted attitude and positioning errors. • Magnetometer: The absolute heading with reference to the Earth's North Pole can be calculated and used to calibrate the sensitivity of the gyroscope, but the capacity is disturbed by the ambient magnetic field. • Pressure sensor: When navigating indoors, the pressure sensor can tell you which floor you are on, assisting the GPS to calculate the altitude; when the GPS signal is weak, the assisted GPS improves the positioning accuracy, but is susceptible to airflow and weather conditions. Based on the above considerations, the Kalman filter is the most commonly used mathematical method to integrate different sensor input information. This method weighs the effects of different sensors and gives the highest weight to the highest performance. Therefore, the Kalman filter algorithm is more accurate and reliable than the single media based navigation system [3]. The current quaternion-based extended Kalman filter (EKF) is a popular sensor integration scheme because the quaternion has only 4 elements and the rotation matrix has 9 elements. In addition, the quaternion method avoids A special problem of the rotation matrix [3]. Accurate positioning anywhere, anytime is a major challenge for advanced mobile applications such as augmented reality, as Augmented Reality is closely related to pedestrian fare estimation (PDR) or location services (LBS). Given the limitations of GPS receiver reception, MEMS sensors are attractive for indoor pedestrian dead reckoning applications because most of these sensors are already present in smartphones. In order to obtain a 5% indoor pedestrian position estimation error, it is necessary to develop a MEMS sensor integration algorithm to correct the defects of each sensor, so that these sensors complement each other. As the performance of MEMS sensors continues to increase, in the near future, the user-independent SINS/GPS integrated navigation system will become the standard configuration for smartphones. 1.A. Lawrence, Modern InerTIal Technology: NavigaTIon, Guidance, and Control, ISBN: 978-0387985077 (hardback), 0387985077 (electronic), 1998 2.STMicroelectronics, Inc. J. Esfandyari et al, MEMS Pressure Sensors in Pedestrian NavigaTIon, Sensors Magazine, Dec. 2010 Http://. . 3.Greg Welch, Gary Bishop, An IntroducTIon to the Kalman Filter, University of North Carolina at Chapel Hill 4.A. Sabatini, Quaternion-Based Extended Kalman Filter for Determining Orientation by Inertial and Magnetic Sensing, IEEE transaction on biomedical engineering, Vol. 53, No. 7, July 2006 Http://ieeexplore.ieee.org/xpl/freeabs_all.jsp? Arnumber=1643403 A-GPS – Assisted Global Positioning System API – Application Programming Interface DGPS – Differential Global Positioning System EKF – Extended Kalman Filter GPS – Global Positioning System LBS – Location Services LCD – LCD MAR – Mobile Augmented Reality MEMS– MEMS PDR – Pedestrian dead reckoning SDK – Software Development Tools SINS – Strapdown Inertial Navigation System UI – user interface
We are dedicated charging solution Manufacturer since 2005.
Supply various Power Station including Portable Power Stations, Solar Power Generators, Smallest Generator etc.
Manufacturing high quality products for customers according to international standards, such as CE ROHS FCC REACH UL SGS BQB etc.
To constantly offer clients more innovative products and better services is our consistent pursuit.
portable power stations for camping, solar pow er stations, jackery portable power station TOPNOTCH INTERNATIONAL GROUP LIMITED , https://www.itopnoobluetoothes.com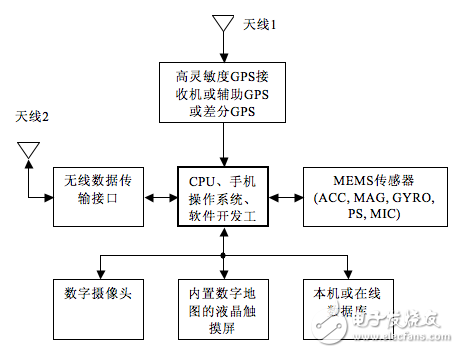
![]() (1)
(1)